
Hiện đang trống: 0 ₫

GIÁ CHỈ BẰNG MỘT TÔ PHỞ, KHÔNG HÀI LÒNG TẶNG MIỄN PHÍ ANH EM 3 KHOÁ HỌC BẤT KÌ
What you’ll learn
-
Understand what TF (TransForm) is and why we need it
-
Create a URDF for any robot (ex: mobile base, robotic arm)
-
Simulate and control your robot in Gazebo
-
Add Links, Joints, Collisions, Inertia tags in the URDF file
-
Understand how to correctly specify links and joints origin
-
Use Gazebo plugins to simulate the hardware control of the robot
-
Improve and clean up the URDF with Xacro (properties, macros)
-
Learn how to use the Robot State Publisher node to publish TF
-
Visualize TFs with RViz
-
Create XML and Python launch files
-
Save and reuse a RViz config in a launch file
-
Create a world in Gazebo
-
Add a sensor in Gazebo
-
Make your robot spawn in a custom Gazebo world
-
Learn best practices right from the start
-
Practice with additional activities and projects
Khóa học gồm:
- Giá:
49.000₫
- Độ dài:9 Giờ
 Bài:0
Bài:0- Ngôn ngữ:Tiếng Anh
Khóa học liên quan

19 Giờ
Tất cả các cấp độ
Khóa học:Robotics and ROS 2 – Learn by Doing! Manipulators
49.000₫
Build and Control with your voice a Real Robot with ROS2
Tải ngay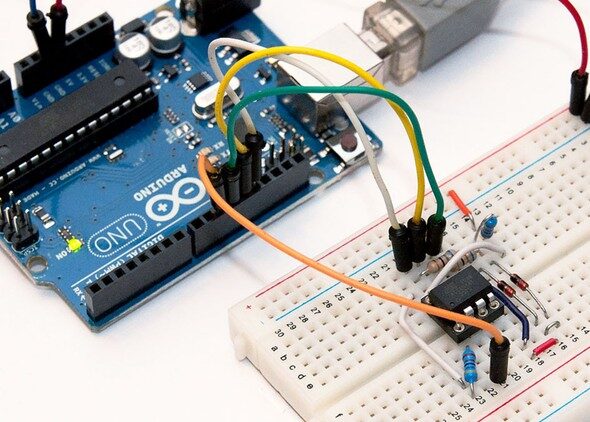
7 Giờ
Tất cả các cấp độ
Khóa học:Advanced Embedded Systems with Arduino
49.000₫
The super simple beginner friendly course to learn all about Arduino and start creating interesting projects
Tải ngay
51 Tuần
Tất cả các cấp độ
CompTIA Linux+ (XK0-005) Complete Course & Exam
69.000₫
CompTIA Linux+ (XK0-005) Bootcamp - Your preparation for the CompTIA Linux+ system administration certification!
Tải ngay
51 Giờ
Tất cả các cấp độ
Khóa học:60 HTML CSS JS projects – HTML5, CSS3 and vanilla JavaScript
69.000₫
HTML CSS JS (JavaScript). Build 60 projects to learn HTML CSS JavaScript. 50+ HTML5, CSS3, vanilla JavaScript projects
Tải ngay

